
DISMISS

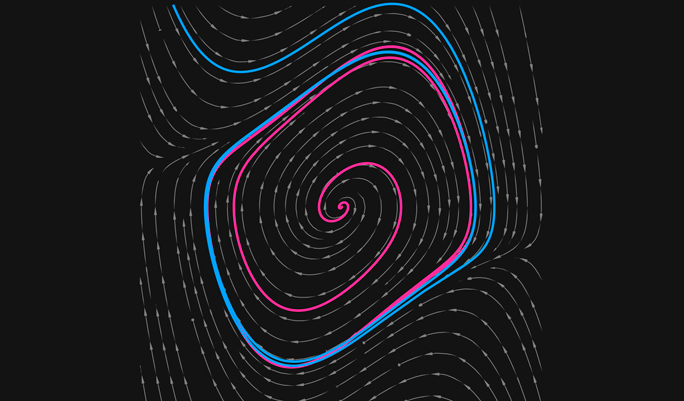
Steering the aggregative behavior of noncooperative agents: a nudge framework
Nudging aggregative behavior
Steering the aggregative behavior of noncooperative agents: a nudge framework

Privacy and robustness guarantees in distributed dynamics for aggregative games
Equilibrium seeking in games
Privacy and robustness guarantees in distributed dynamics for aggregative games
Peaking attenuation of high-gain observers using adaptive techniques: state estimation and feedback control
Adaptive-nonlinear observers
Peaking attenuation of high-gain observers using adaptive techniques: state estimation and feedback control
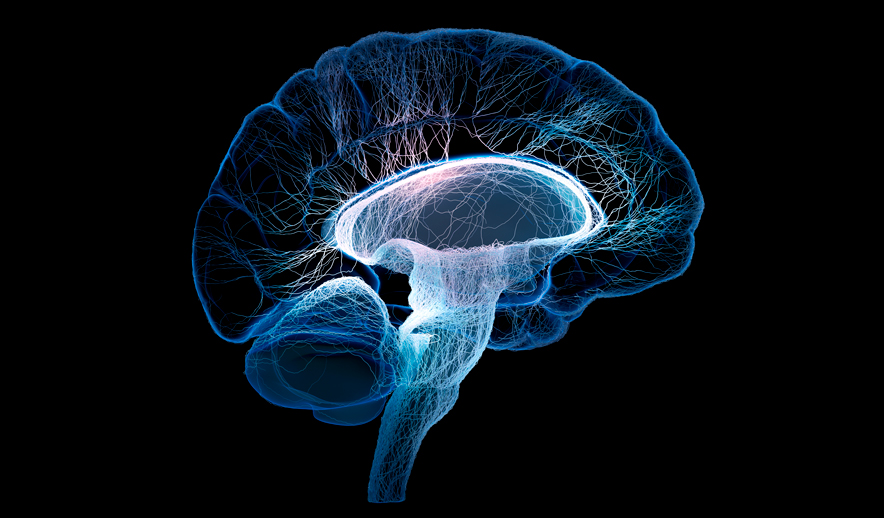
Intraoperative brain shift estimation using atlas of brain deformations and constrained Kalman filter
Brain shift estimation
Intraoperative brain shift estimation using atlas of brain deformations and constrained Kalman filter

Hi, it's me!
I design algorithms that solve problems. I'm in the last year of my PhD at the University of Groningen, and my research is about forming collaboration between self-interested agents. I find solutions using tools from optimization, control and game theory.
I'm also passionate about machine and deep learning and using data to solve problems. My main interest is building data-driven models that answer complex questions.
When I'm not building algorithms, you'll find me learning piano, solving cubes or working out.
Want to work together or have any questions?
Send me a message at mehran.shakarami@gmail.com, or fill in the contact form.